| 型号 | RB08 | |
| 自由度 | 6 | |
| 驱动方式 | 交流伺服驱动 | |
|
有效负载
(kg)
|
8 | |
|
重复定位精度
(mm)
|
±0.05 | |
| 运动范围(°) | J1 | ±170 |
| J2 | +120~-85 | |
| J3 | +75~-155 | |
| J4 | ±180 | |
| J5 | ±135 | |
| J6 | ±360 | |
| ***大速度(°/s) | J1 | 154 |
| J2 | 154 | |
| J3 | 154 | |
| J4 | 420 | |
| J5 | 252 | |
| J6 | 620 | |
|
允许***大扭矩
(N.m)
|
J4 | 14 |
| J5 | 12 | |
| J6 | 7 | |
|
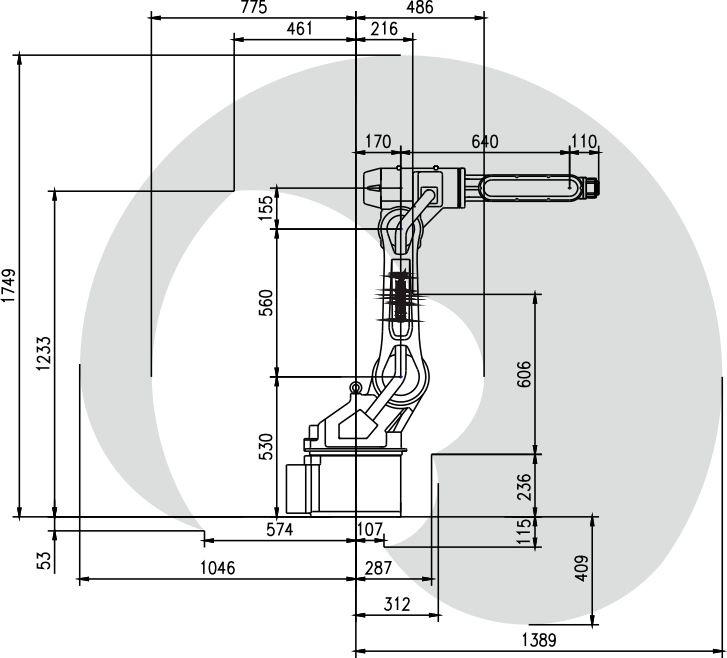
运动半径
(mm)
|
1389 | |
|
本体重量
(kg)
|
180 | |
GSK RB08
2021-02-20 16:54 165次点击

联系方式
公司:GSK机器人集成
发信:点此发送
姓名:谢开欢(先生)
电话:18616568600 咨询
咨询
手机:18616568600(微信)咨询
地址:上海市宝山区富联一路98弄6号
邮件:2925530387@qq.com
发信:点此发送
姓名:谢开欢(先生)
电话:18616568600
手机:18616568600(微信)
地址:上海市宝山区富联一路98弄6号
邮件:2925530387@qq.com