
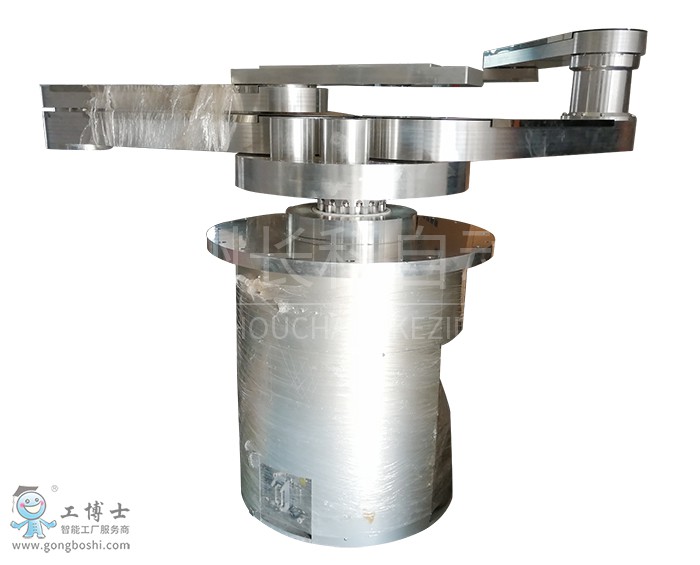
三协双臂真空搬运机器人SR8651参数:
真空度(Pa):1.33×10-2;
自由度:5-AXIS(all AC-servo controlled);
动作范围「RR/RL 轴」(L):2400;
动作范围「Z 轴」(L):250/450;
可动范围「θS」(deg):+140~-185;
***大速度「RR/RLS」(L/sec):3370;
***大速度「Z 轴」(L/s):300;
***大速度「θ轴」(rads/s):2.09;
***大速度「重复精度」(L):+/-0.2;
***大速度「噪音」(dB):80 or less
***大速度「基板尺寸」(L):~1100×1300 t=3.1~5.2/~1300×1500 t=0.5~1.1/~1500×925 t=0.5~1.1
三协双臂真空搬运机器人SR8652参数:
真空度:1.33×10-2;
自由度:5-AXIS(all AC-servo controlled);
动作范围「RR/RL 轴」(L):2720;
动作范围「Z 轴」(L):465(Solar)/670(LCD);
动作范围「θ轴」(deg):+140~-185;
***大速度「RR/RL 轴」(L/sec):2474;
***大速度「Z 轴」(L/s):400;
***大速度「θ轴」(rads/s):2.09;
***大速度「重复精度」(L):+/-0.2;
***大速度「噪音」(dB):80 or less;
***大速度「基板尺寸」(L):1100×1300 t=4~5(Solar);
***大速度「基板尺寸」(L):~1500×1850 t=0.5~1.1(LCD)
真空机器人是一种能够在真空环境下工作的机器人,主要应用于半导体和液晶工业中,实现晶圆或玻璃基板在真空腔室内的运输。真空搬运机器人由于不使用气体真空吸附系统和气缸等,因此搬运时保持晶圆在机器手上的稳定比较困难。因此,此前只能以150~200枚/时的速度搬运晶圆。此次,通过改进保持晶圆稳定的真空内的夹具,即使高速搬运,机器手上的晶圆也不会错位。这样,可***大限度发挥真空机器人的搬运速度。三协真空机器人可以在10-7 pa的真空环境下运行。耐温达200工。此系列真空机器人大部分组件采用不锈钢或热膨胀系数相当的并且出气率底的材料。