
川崎机器人涂装
实现客户期望的过程控制和涂装质量
自动涂装应用需要专门的设备来实现准确和一致的漆面质量。这个专门的设备,包括防爆机器人手臂、喷涂器/钟、齿轮泵、换色歧管、电磁阀、传感器和压力调节器(仅举几例)。川崎提供了各种技术来解决与实现一致的优质漆面质量相关的挑战。
川崎提供一系列新颖的机器人手臂,具有各种尺寸和配置,可以满足任何机器人涂装应用。这些手臂拥有轻质铝铸件、三辊中空手腕,以及容纳电气控制设备的防爆腔。某些型号包含一个开口的"处理手臂",用于安装任何制造商的涂装处理设备,其靠近喷涂器,可以实现响应性涂装处理控制。除了具有水平腰关节的标准6轴自动式涂装机器人,7轴台座式机器人也可用。第七轴被作为附加(垂直)的腰关节,经过专门设计以增加机器人的重要工作范围。
川崎广泛的自动化涂装经验可以帮助您克服油漆涂装吞吐量、一致性和质量的挑战。
KF194机器人
防爆涂装机器人
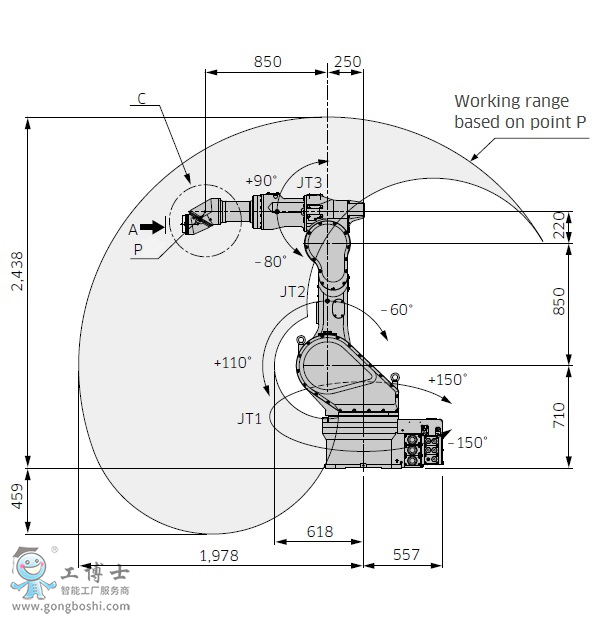
拥有φ70的大中空内径和外形紧凑的手腕,是一款线缆内置、动作范围小的防爆喷涂机器人。对节省空间做出了杰出的贡献。KF194概述:
川崎喷涂机器人KF193负载12 kg
川崎喷涂机器人KF193水平伸展距离1,978 mm
KF194的规格
| KF194的规格 | |||
| 手腕类型 | 3Rø70 1 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| *大负载能力 (kg) | 手腕:12 手臂:20 | ||
| *大臂展 (mm) 2 | 1,978 | ||
| 重复定位精度 (mm) 3 | ±0.5 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±150 | |
| 手臂前后 (JT2) | +110 - -60 | ||
| 手臂上下 (JT3) | +90 - -80 | ||
| 手腕旋转 (JT4) | ±720 | ||
| 手腕弯曲 (JT5) | ±720 | ||
| 手腕扭转 (JT6) | ±410 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 35.3 | |
| 手腕弯曲 (JT5) | 27.7 | ||
| 手腕扭转 (JT6) | 7.9 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 1.44 | |
| 手腕弯曲 (JT5) | 0.89 | ||
| 手腕扭转 (JT6) | 0.10 | ||
| 重量 (kg) | 750 | ||
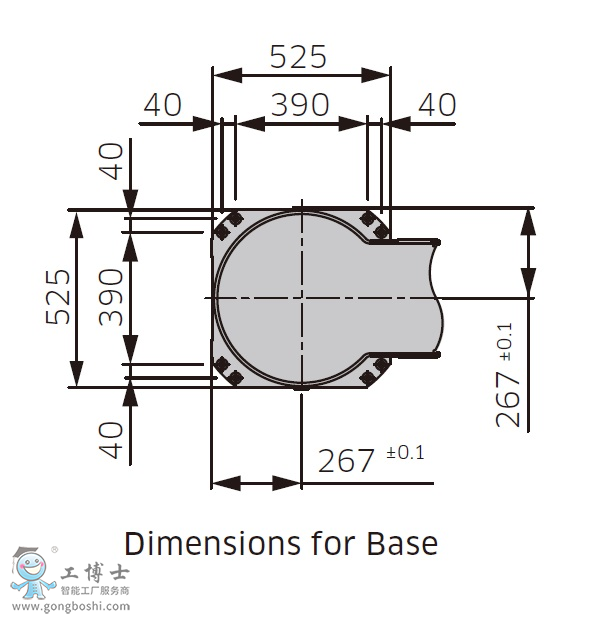
| 安装方式 | 地面, 壁挂 | ||
| 防爆构造 | 欧洲中国韩国 | 内压防爆及本质安全防爆的复合型 (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | |
| 安装条件 | 环境温度 (°C) | 0 - 40 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | 面向美国 | - | |
| 面向欧洲 | E45 / 5.1 | ||
| 面向日本亚洲 | E25 / 10 | ||
| 喷涂速度 (m/s) | 2.0 | ||
| 防爆构造 | 美国 | - | |
| 加拿大 | - | ||
| 欧洲中国韩国 | 内压防爆及本质安全防爆的复合型 (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | ||
| 日本亚洲 | 内压防爆及本质安全防爆的复合型 (Expib ⅡB T4 / Exib ⅡB T4) | ||