
CX系列 (110-210kg)机器人
装配有大型中空结构手臂和新型通用控制柜的CX系列机器人,可对应从物料搬运到点焊等多种应用的新型大型通用机器人。
高性能,无需频繁维修
高性能,无需频繁维修
川崎大负载机器人拥有工业领域**地位的可靠性。维修周期长达10,000小时以上,可提高生产效率的同时也可降低运营成本。
实现高速运动
高输出,高转速电机和高能运动控制技术使得川崎大负载机器人出类拔萃。以上优势同时也大大降低了一系列动作的周期以至于提高产品生产量。
Kawasaki CX210L概述:
负载 210 kg
臂展 2,699 mm
典型应用: 装配、摩擦点接合、机器管护、物料搬运、材料去除、涂胶、点焊
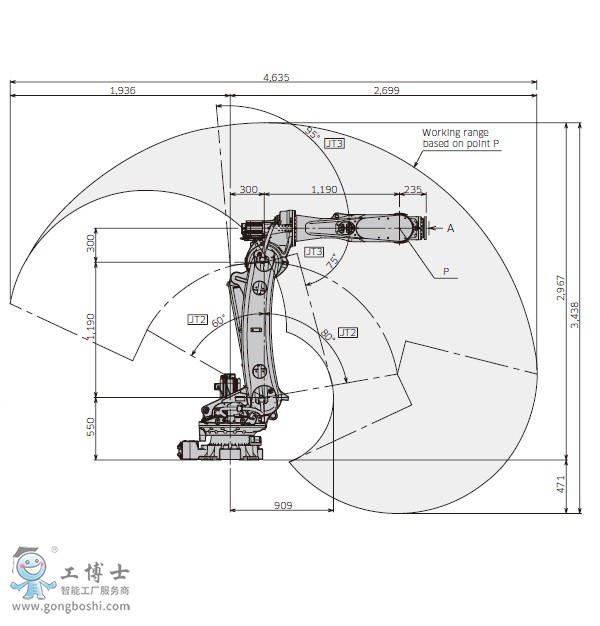
动作范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
CX210L的规格
| CX210L的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| *大负载能力 (kg) | 210 | ||
| *大臂展 (mm) | 2,699 | ||
| 重复定位精度 (mm)1 | ±0.06 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±160 | |
| 手臂前后 (JT2) | +80 - -60 | ||
| 手臂上下 (JT3) | +95 - -75 | ||
| 手腕旋转 (JT4) | ±210 | ||
| 手腕弯曲 (JT5) | ±120 | ||
| 手腕扭转 (JT6) | ±360 | ||
| *大速度 (°/s) | 手臂旋转 (JT1) | 125 | |
| 手臂前后 (JT2) | 115 | ||
| 手臂上下 (JT3) | 115 | ||
| 手腕旋转 (JT4) | 155 | ||
| 手腕弯曲 (JT5) | 160 | ||
| 手腕扭转 (JT6) | 220 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 1,370 | |
| 手腕弯曲 (JT5) | 1,370 | ||
| 手腕扭转 (JT6) | 700 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 199.8 | |
| 手腕弯曲 (JT5) | 199.8 | ||
| 手腕扭转 (JT6) | 154.9 | ||
| 重量 (kg) | 870 | ||
| 安装方式 | 地面 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | E02 / 7.5 | ||
1: 以ISO9283为基准。
了解更多川崎机器人产品信息:http://hyundiy.gongboshi.com