UR10e 协作式工业机器人
UR10e是一款功能多样的协作式工业机器人手臂,拥有高达10公斤的有效载荷和**的伸展能力。不仅具有1300mm的工作半径,还兼具超凡的精度和有效载荷。UR10e适用于各种机床管理、码垛和包装等任务。
UR10e让协作自动化走进您的业务。
编程简单
**技术让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可。
安装快捷
优傲Cobot对协作式机器人的设置进行了变革,将以星期为衡量单位的典型机器人部署缩减到以小时为衡量单位。我们客户报告的平均设置时间仅为半天。对于未经训练的操作员而言,从开箱到取出协作式机器人、安装机器人、到首次简单作业编程,通常不到一个小时便能完成。
部署灵活
别受限于专用机器人。优傲六轴机器人轻巧、节省空间、易于重新部署在多个应用程序中,而不会改变您的生产布局。将协作式机器人移至新的流程中十分快捷容易,让您能灵活自动处理几乎任何手动作业,包括小批量或快速切换作业。协作式机器人能够复用为经常性作业设置的编程。
协作性与安全性
现在您可以替换掉从事肮脏、危险和枯燥工作的人工操作员,以减少重复性劳损和意外受伤。在全球数千台 UR Cobot 机器人中,有 80% 的机器人在无安全保护防护装置(经过风险评估后)、旁边无人工操作员的情况下运转操作。我们机器人的安全系统获得 TÜV(德国技术监督协会)的批准和认证。
| UR10e | ||
| 性能 | ||
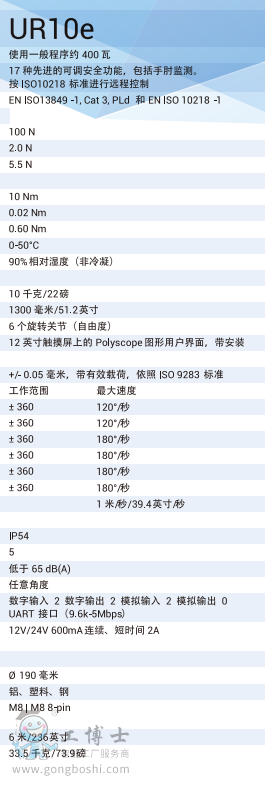
| 功耗 | 使用一般程序约250瓦 | |
| 协作操办 | 17种**的可调安全功能,包括手肘监测。 按ISO 10218 标准进行远程控制 | |
| 认证 | EN ISO 13849-1,Cat 3,PLd 和 EN ISO 10218-1 | |
| 力控传感器——力,x-y-z | ||
| 范围 | 100N | |
| 分辨率 | 2.0N | |
| 精度 | 5.5N | |
| 力控传感器——扭矩,x-y-z | ||
| 范围 | 10Nm | |
| 分辨率 | 0.02Nm | |
| 精度 | 0.60Nm | |
| 环境温度范围 | 0-50℃ | |
| 湿度 | 90%相对湿度(非冷凝) | |
| 规格 | ||
| 有效负载 | 10千克/22磅 | |
| 工作半径 | 1300毫米/51.2英寸 | |
| 自由度 | 6个旋转关节(自由度) | |
| 编程 | 12英寸触摸屏上的Polyscope图形用户界面,带安装 | |
| 移动 | ||
| 位姿可重复性 | ´+/-0.05毫米,带有效载荷,依照ISO 9283 标准 | |
| 轴移动机械臂 | 工作范围 | *大速度 |
| 基座 | ±360 | 120°/秒 |
| 肩部 | ±360 | 120°/秒 |
| 肘部 | ±360 | 180°/秒 |
| 腕部1 | ±360 | 180°/秒 |
| 腕部2 | ±360 | 180°/秒 |
| 腕部3 | ±360 | 180°/秒 |
| 典型TCP速度 | 1米/秒/39.4英寸/秒 | |
| 特点 | ||
| IP等级 | IP54 | |
| ISO洁净室等级 | 5 | |
| 噪声 | 低于65dB(A) | |
| 机器人安装 | 任意角度 | |
| 输入/输出端口 | 数字输入2 数字输出2 模拟输入2 模拟输出0 UART 接口(9.6k-5Mbps) | |
| 工具中的输入/输出电源 | 12V/24V 600mA连续、短时间2A | |
| 物理 | ||
| 占地面积 | φ190毫米 | |
| 材料 | 铝、塑料、钢 | |
| 工具(末端执行器)连接器类型 | M8|M8 8-pin | |
| 电缆长度机械臂 | 6米/236英寸 | |
| 重量(含缆线) | 33.5千克/73.9磅 | |